OpenScenario1.0
为了实现自动驾驶场景设计的标准化,德国自动化及测量系统标准协会(ASAM)推出了OpenX系列标准。
例如OpenDrive标准用于描述场景静态信息的路网,OpenCRG描述路面信息,而OpenSCENARIO则是用来描述动态场景的。
这里会对学习到的OpenSCENARIO 1.0(下称OSC)相关内容进行记录。那之后ASAM也发布了OSC的1.1和1.2版,相关笔记会更新在后面。
部分翻译根据个人理解做了调整,一切以英文为准(特别的,“/概念名称”是我认为相对值得一提但没有采用的官方文档翻译;更特别的,这官方中文真够烂的)。
参考:
更新:
- 自最近的一次更新后,OSC1.x系列被更名为OSC XML系列,以和OSC DSL系列(即原OSC2.x)作区分。
OSC场景基本概念/方案
场景的基础概念是“谁,在哪里,做什么”,即实体在路网上根据故事板定义的一组指令进行交互。
场景定义的五个基本概念(Concept/方案)是:
- Entity:实体,车辆行人等参与者。
- RoadNetwork:路网,静态的场景元素,包括OpenDRIVE、交通信号、环境模型等。
- StroyBoard:故事板/场景剧本,完整的动态描述。
- 另有两个内容:ParameterDeclaration参数声明和Catalog目录,将在将来用到时提及。
场景构成
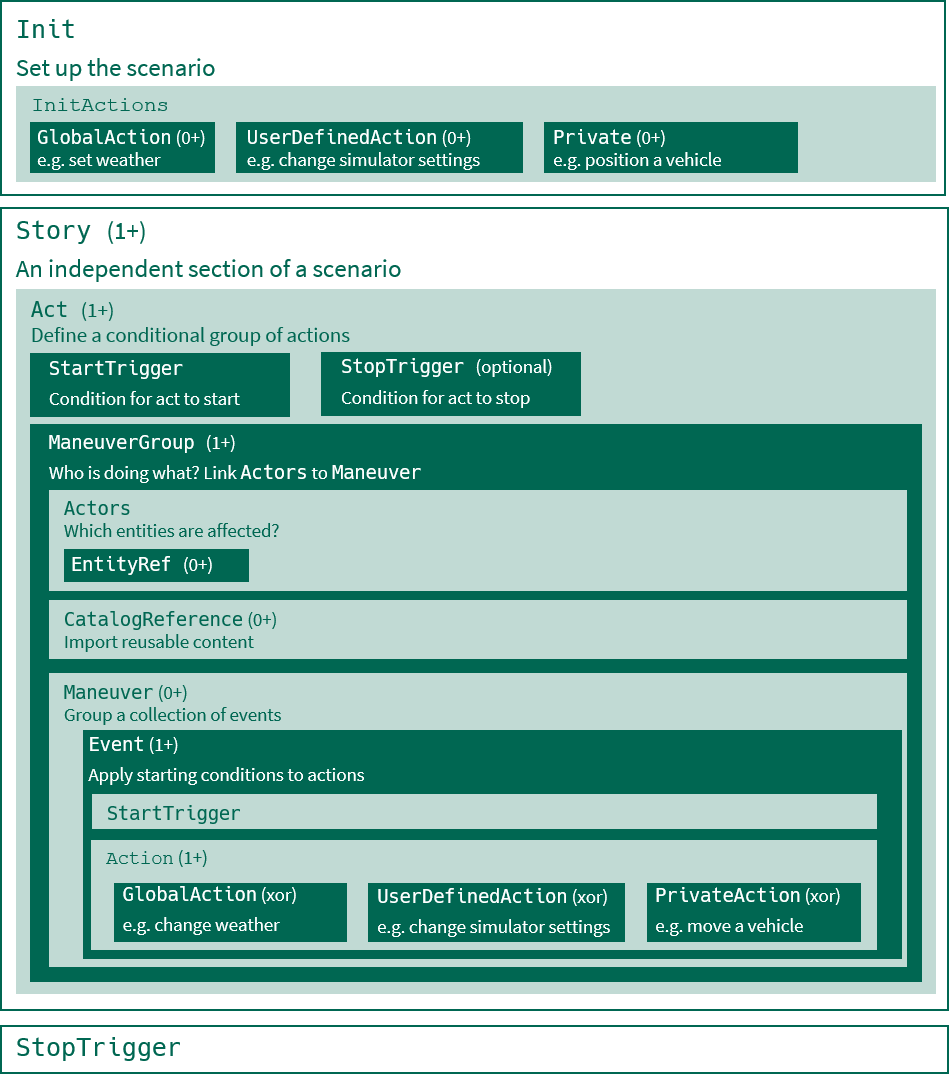
OSC通过StoryBoard描述整个场景的完整内容,它有下述构成:
- Story:故事,即最高层次的场景描述单位;至少1个。
- Act:幕,包含了触发开始条件(和触发结束条件,可选),只有触发时下述内容才会执行;至少1个。
- ManeuverGroup:操作组,明确交互主体和交互动作,即连接Entity和Maneuver;至少1个。
- Actors:角色,即被影响的实体。
- EntityRef:被引用实体,即被影响的实体列表;至少0个(因为操作组有可能并不影响实体)。
- CatalogReference:可被重复使用的内容;至少0个。
- Maneuver:操作,即事件组,包含若干事件;至少0个。
- Event:事件,有触发开始条件;至少1个。
- Action:动作,与场景产生交互,例如改变天气、改变设置、定位车辆;至少1个。
以上的所有内容都被称为StoryBoardElement(故事板元素/场景剧本要素)。
故事板元素状态及其状态机
StoryBoardElement拥有3种状态,即为StoryBoardElementState(故事板元素状态):
- StandBy(standByState):待机状态
- Running(runningState):运行状态
- 不同的StoryBoardElement会在不同情况时结束这一状态,具体可见官方文档
- Complete(completeState):完成状态
- 值得一提,如果要重置回待机状态,需要其父级StoryBoardElement重新启动
对于在这3种状态中切换,有4种Transition(转换):
- Start(startTransition):启动转换
- End(endTransition):结束转换
- 当这个Transition返回否定结果时,会回到StandBy,否则进入Complete
- Stop(stopTransition):停止转换
- 和上一个不同,无论是StandBy和Running,这个Transition都会让故事板元素状态变为Complete。
- Skip:跳过

Entity简介
Entity有两类:
- 车辆行人等(根据类型不同拥有不同的Property属性)
- 其他物体(与OpenDRIVE中的对象类相同)
Entity默认拥有一个Controller(控制器),用于接收来自控制算法之类的指令。
此外,Entity的实例会被分为两种:
- 某一单个Entity实例
- 被称为EntitySelection的一组Entity
EntitySelection被选实体
EntitySelection是将场景中已经存在的若干Entity进行快速分组。
这样分组,是为了能一同在其他地方被引用(例如批量生成Entity实例,并执行相同的动作)。
Trigger触发器与Condition条件
在Act以及Event中,都需要使用这两种主要的Trigger(触发器)来控制流程的启停:StartTrigger和StopTrigger。
StartTrigger将故事板元素从standByState切换到runningState;而StopTrigger将其从其他状态(待机或运行)切换到completeState。
一个Trigger的结果是一个T/F值,这是由它所含有的Condition(条件)以逻辑运算共同决定的。
为此,OSC将Condition的逻辑运算设计成这样:
- ①若干Condition关联成为一个ConditionGroup(条件组);ConditionGroup的结果为所有Condition结果之和/AND。
- ②若干ConditionGroup一同放入一个Trigger中;Trigger的结果为所有ConditionGroup结果之或/OR。
有关StartTrigger
拥有StartTrigger的故事板元素:
- Act
- Event
没有StartTrigger的故事板元素,例如ManeuverGroup和Maneuver,它们会继承父级的StartTrigger,也就是从Act中继承;具体表现也就是当Act启动后,其底下的ManeuverGroup都会自动启动。
但是,如果拥有自己的StartTrigger,那它们的启动就要满足它们自己的Condition;而如果它们的父级Act不在runningState(运行状态),则不能启动,这是不言自明的。
此外,Story也不需要startTrigger,毕竟在仿真启动时它就自然被启动了。
有关StopTrigger
拥有StopTrigger的故事板元素:
- Story
- Act
同StartTrigger,其他故事板元素会继承父级的StopTrigger;但有所不同的是,一旦父级故事板元素停止了(进入completeState),无论自己有没有StartTrigger,它底下的所有故事板元素同样都要立刻停止。
Condition简介
Condition有3个属性:
- name:标识名
- delay:延迟,从触发conditionEdge到返回True结果之间的时间差
- conditionEdge:条件边缘,其有4种类型:
- rising:上升沿,逻辑表达式从False向True跳转的瞬间返回True,否则一直返回False
- falling:下降沿,逻辑表达式从True向False跳转的瞬间返回True,否则一直返回False
- risingOrFalling:上升或下降沿,逻辑表达式一旦变化就返回True,否则一直返回False
- none:无,直接返回逻辑表达式结果
和2个元素,会与conditionEdge有关联:
- byEntityCondition:与实体有关的条件,即该Condition的逻辑表达式与某些实体有关,有2个元素:
- triggerringEntities:说明与哪些Entity有关
- entityCondition:具体的Condition逻辑表达
- byValueCondition:与数据有关的条件,即该逻辑表达式和非实体的数据,比如信号灯信息等有关
操作、事件与动作
正如上文所述,ManeuverGroup主要包含Actors和Maneuver这两部分。前者决定哪些Entity会被影响,而后者描述具体是什么Action影响(以及是怎么被触发Event的)。
特别的,Actors元素拥有一个属性selectTriggeringEntities(选择触发实体)。当其为真时,之前提到的byEntityCondition的triggerringEntities中的所有Entity,都会在Condition为真时被加入到Actors中。
Action动作
对于Action有以下3种分类,各自的下层元素具体可见官方文档:
- PrivateAction:专属动作,必须被分配给Entity实例,一般用于描述车辆运动。
- GloabalAction:全局动作,用于修改场景内容,包括改变环境、增删Entity等。
- UserDefinedAction:用户自定义动作。
动作会应用在2种场合中:
- Init初始化阶段,设置各种对象的初始状态
- Event里,在其被触发时执行
当同时执行的Action在修改相同的数据,此时就可能会被认为是冲突了。根据冲突两者的类型不同,不同的冲突会有不同的处理方式,但一般而言,后出现的Action会覆盖前一个Action(意味着触发了它的stopTrigger)。
OSC 1.1
1.1版本相对1.0进行了下述调整:
- 支持了逻辑场景,即对参数进行随机或步进等设置而自动生成变体场景
- 更灵活的操作模型,例如数字运算和逻辑表达
- 兼容更多的路网格式,比如地理坐标系统
- 更好的测试支持,比如变量范围约束
- 变量和属性声明的变动
此外,1.1版的用户指南(User Guild)也更加详细地描述了OSC的相关内容,对原本的逻辑进行了补充。
结构
OSC的程序结构应分为三部分:
- OSC模型实例(OSC Model Instance),即OSC相关数据存储的实例
- OSC导演(OSC Director),即将OSC模型实例中的数据解释出来的模块
- 模拟器内核(Simulator Core),即OSC模型之外的所有仿真元素集合的模拟器,包括路网、实体、环境等
可见,OSC导演通过解释OSC模型实例的方式去描述场景动态,以此修改模拟器内核里的相关元素以实现仿真。
重用机制
参数
参数的命名规则是:
- 必须以英文字母(a-z,A-Z)或下划线(_)开头
- 大小写敏感
- 可以包含数字(意思是参数名只能是大小写字母、数字和下划线的组合)
参数的声明:
1 | <ParameterDeclarations> |
表达式
OSC1.1的参数表达式格式为:${Expr}
泛化参数设置指北
在这里记录了一般常用的泛化用参数。
- 速度
- 主车初速度
<ParameterDeclaration name="$egoV_InitSpeed" parameterType="double" value="17"> - 其他车初速度
<ParameterDeclaration name="$xxV_InitSpeed" parameterType="double" value="17">
- 主车初速度
- 触发器
- 距离
<ParameterDeclaration name="$xxV_XxxDistance" parameterType="double" value="0"> - 时间
<ParameterDeclaration name="$xxV_XxxTime" parameterType="double" value="0">
- 距离
- 天气
- 车辆类型
- 颜色
<ParameterDeclaration name="$xxV_ColorCode" value="#000000"><Property name="model_color" value="#000000">- 常用颜色代码:红色#FF6347,蓝色#6495ED,白色#FFFFFF
- 颜色